
Wearable Haptic Feedback System
I am conducting research under Professor Doug Weber on developing a wearable haptic feedback system for motor learning and rehabilitation. The project centers on an ergonomic, 3D-CAD-designed wrist device with Linear Resonant Actuators (LRAs) to deliver precise vibro-tactile cues.
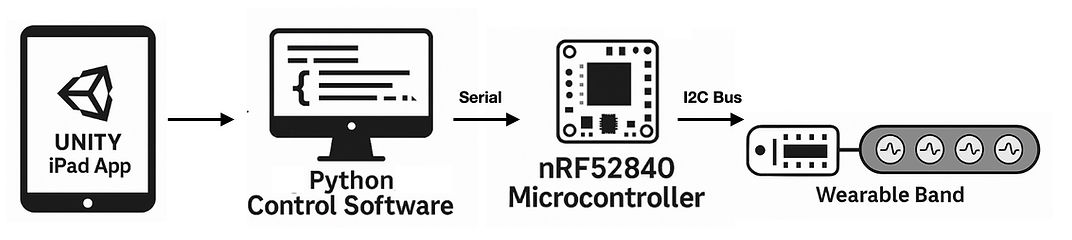
I led fabrication of the custom haptic module and am now implementing a Bluetooth-enabled PCB controller for real-time feedback. Working with a cross-functional team, we are integrating the device with a Unity-based iPad app that guides users through drawing and tracing tasks. The synchronized haptic cues and motion tracking support data-driven analysis of motor performance, with broad applications in assistive technology and human-computer interaction.
I am also co-authoring a research paper detailing the system architecture and initial results.
Aim: To investigate how spatially encoded haptic feedback delivered through a wearable system influences task performance and motion guidance during a drawing-based experiment.
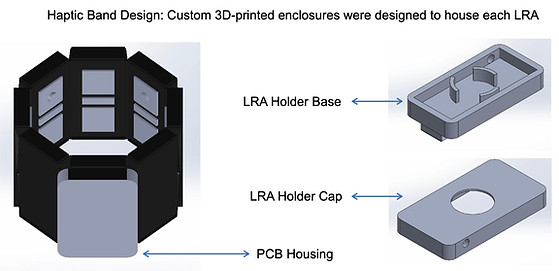
System Architecture Design: Hardware
-
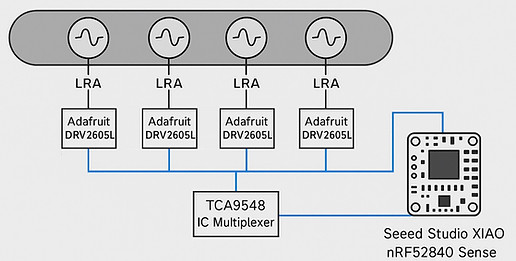
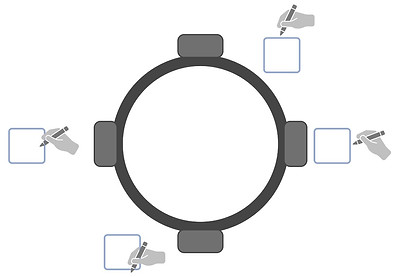
A wearable band with 4 Linear Resonant Actuators (LRA) to deliver vibrotactile cues around the forearm
-
Each LRA is controlled by an Adafruit DRV2605L haptic driver, routed through an I²C multiplexer (TCA9548A)
-
The system is powered by a Seeed Studio XIAO nRF52840 Sense microcontroller
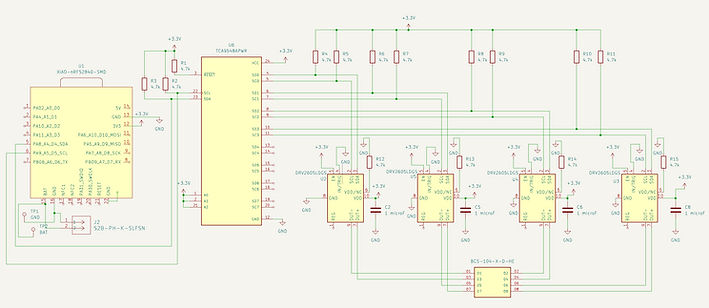
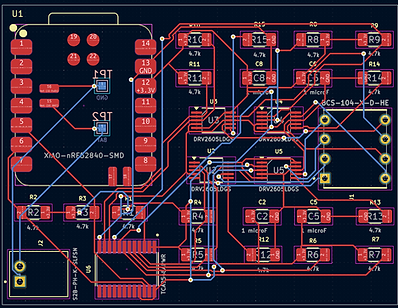
Custom PCB & Embedded Control
Linear Resonant Actuator - Selection & Analysis

-
Critical Component Selection – The most critical part is selecting the right LRA for vibrotactile feedback, since performance relies on its resonant frequency
-
Frequency Matching – Ensuring all LRAs share the same resonant frequency is essential for consistent and reliable haptic intensity.
-
Validation – Power Spectral Density (PSD) analysis confirmed the resonance peak across multiple trials and signal types.
System Architecture Design: Software
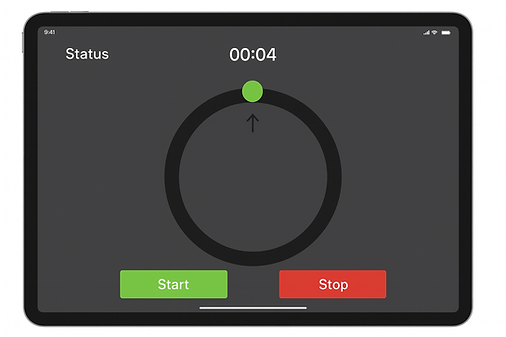
Unity IPad App - Drawing Task

Python Control Software: Multi-Mode GUI
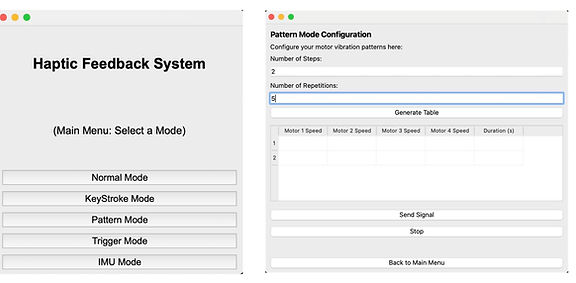
Operational Modes:
-
Normal Mode – Manually adjust LRA vibration frequency and intensity
-
KeyStroke Mode – Map keyboard keys (0–9) to vibration levels for rapid testing
-
Pattern Mode – Create and replay complex vibration sequences with customizable intensity, timing, and distribution
-
Trigger Mode – Deliver haptic feedback in response to external triggers (e.g., sensors or scripts)
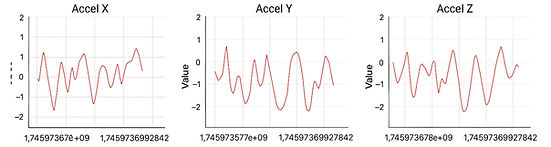
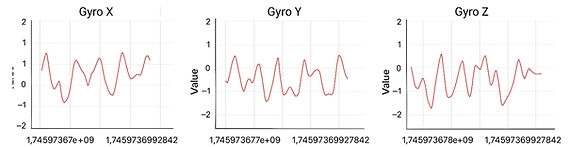
IMU Data
-
Real-time visualization of 6-axis IMU data on the GUI, displaying accelerometer and gyroscope outputs from the microcontroller
-
Allows the haptic band to react to motion or work with other movement-based systems
Ergonomic Iteration & Prototyping

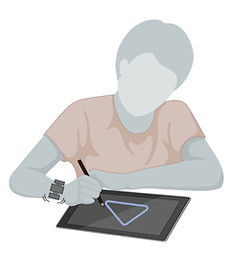
Experimental Design
-
Users trace shapes on an iPad
-
4 LRAs give directional feedback
-
Vibrations alert the user when they move off the guide line in any direction - up, down, left, or right
-
Diagonal drift triggers two LRAs at once
4 Test Condition:
-
No Feedback – No cues
-
Haptic Only – Vibrates on deviation
-
Visual Only – Shows drawn line
-
Haptic + Visual – Shows line + vibrates on deviation