Tele-Operated Rescue Robot
I collaborated with an interdisciplinary team to design and build a tele-operated rescue robot capable of navigating disaster-stricken environments under poor lighting and low-connectivity conditions. Developed at the CMU Robotics Institute, the robot was designed to traverse multi-layer obstacle courses - including climbing stairs, crossing rubble, and withstanding a 2-foot drop - while maintaining robust performance despite network instability.
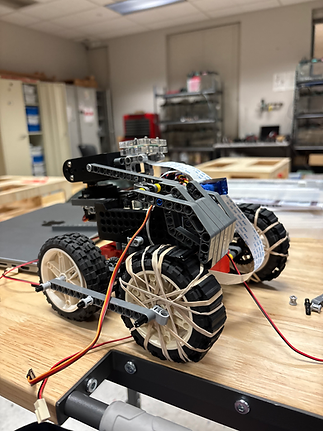
We integrated a Raspberry Pi with BrickPi for motor control and wireless communication, enabling real-time remote operation even in intermittent connectivity. OpenCV was used for basic visual processing, while a durable, 3D-printed drivetrain ensured mechanical resilience during physical stress testing. The system was validated through rigorous obstacle navigation and drop impact tests, demonstrating its viability for search-and-rescue deployment in post-disaster zones.
Navigation in Multi-Story Disaster Environments


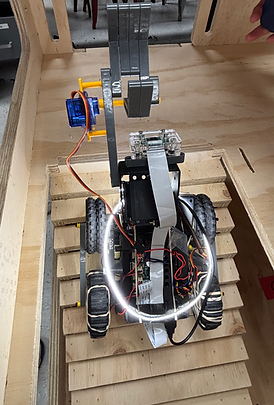
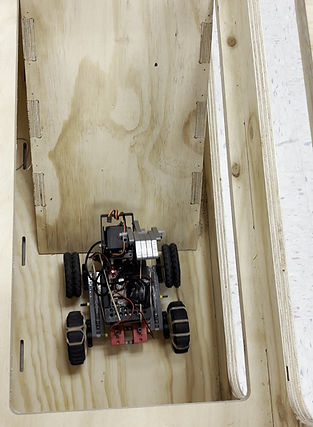
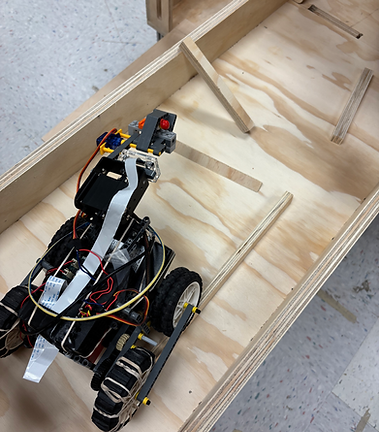
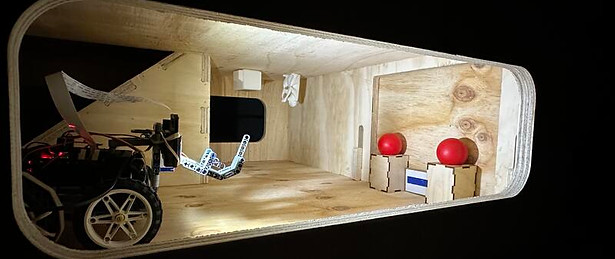
An obstacle course simulating disaster response, with rubble, multiple floors, and staged rescue tasks involving LEGO figurines.
Robot Performance Across Adverse Conditions

1. Climb Steps
2. Navigate up ramps
3. Rescue LEGO figurine through rubble
Tele-operated in low connectivity conditions
-
All tasks were completed in the dark
-
The robot had its own light source: an LED strip
-
A Raspberry Pi camera was attached to the robot
-
The driver could see the robot through the camera and navigate using the live feed